At Mujin Inc. in Tokyo, Japan, I had the privilege to intern and contribute to groundbreaking robotic technology. I spearheaded the development of a robot dynamics identification feature for the Mujin Controller, touted as the “world’s first AI-driven intelligent robot controller for motion planning”. This enhanced feature refines the robot torque model, thereby optimizing motion planning.
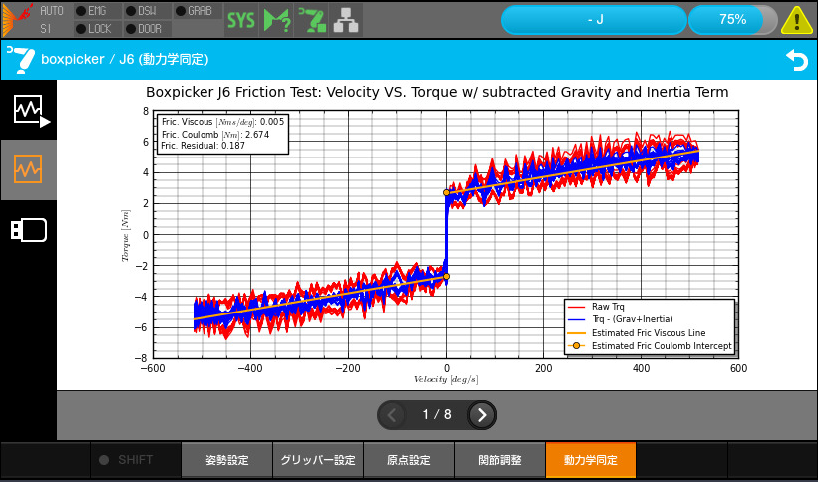
Friction Test Results with Friction Coefficient Estimates
Specifically, it identifies and adjusts coefficients for:
- Motor Friction (both viscous and coulomb)
- Mass & Center of Mass (COM) for Links
- Inertia Tensor
You can see the prowess of this feature in the simulation video provided, which highlights automated inertia pose validation based on real-world experiments.
Proudly, this feature transitioned from a conceptual phase to actual production and is now a staple in Mujin controllers, delivered to industry giants like PALTAC, Askul, JD.com, and more.

COM visualization dev tool, shows Mass*Center of Mass optimization possibilities
Further accomplishments during my tenure included:
- Integration of Mujin’s advanced robot test trajectory generation.
- Creation of bespoke data analysis, fitting, and optimization tools and algorithms.
- Enhancement of user-centric data visualization tools, tailored specifically for dynamics validation.
Short cameo of me working on dynamics identification feature @ 0:33 :)